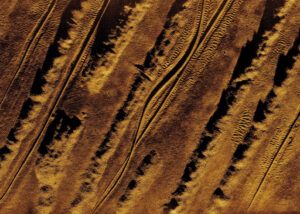
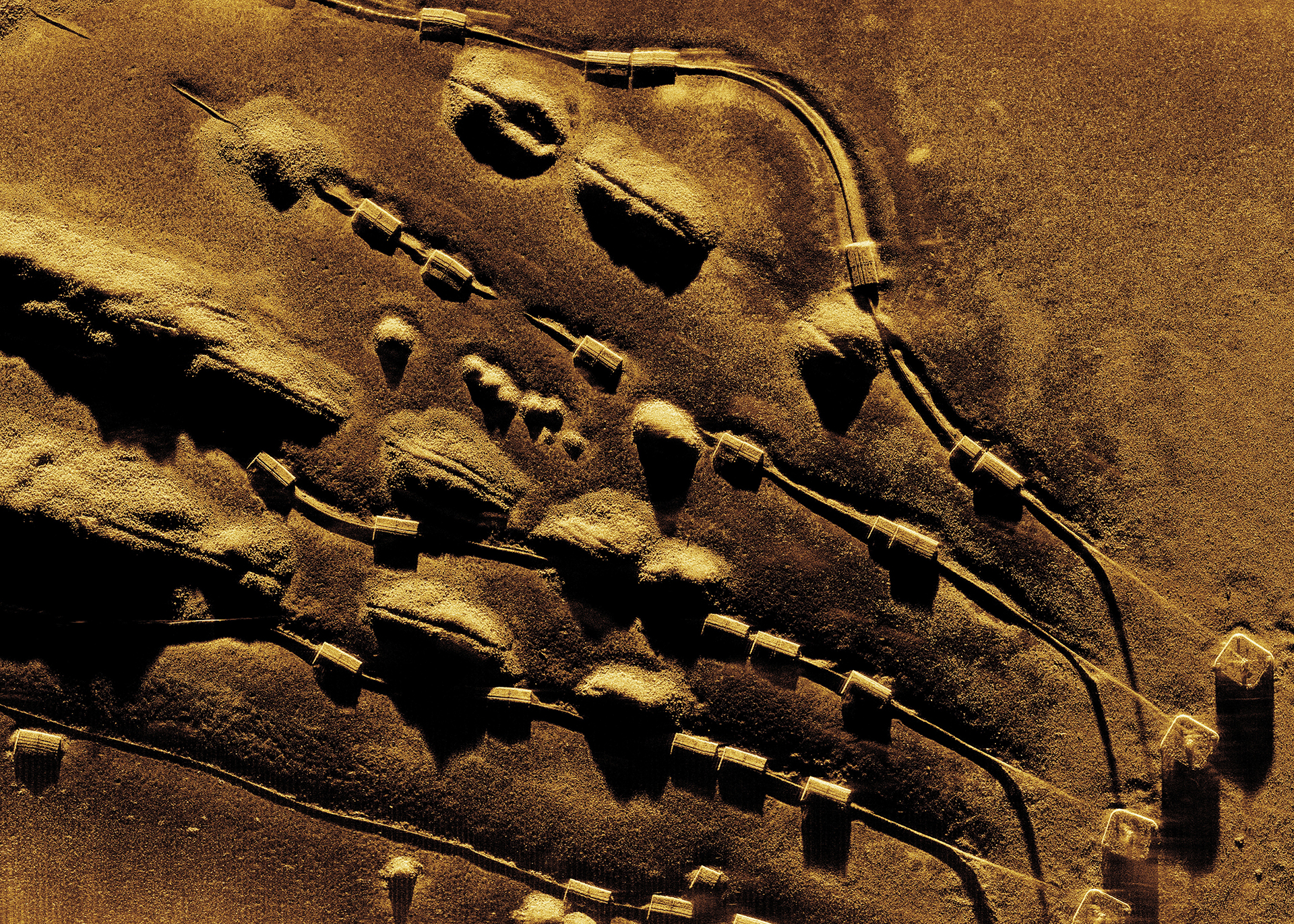
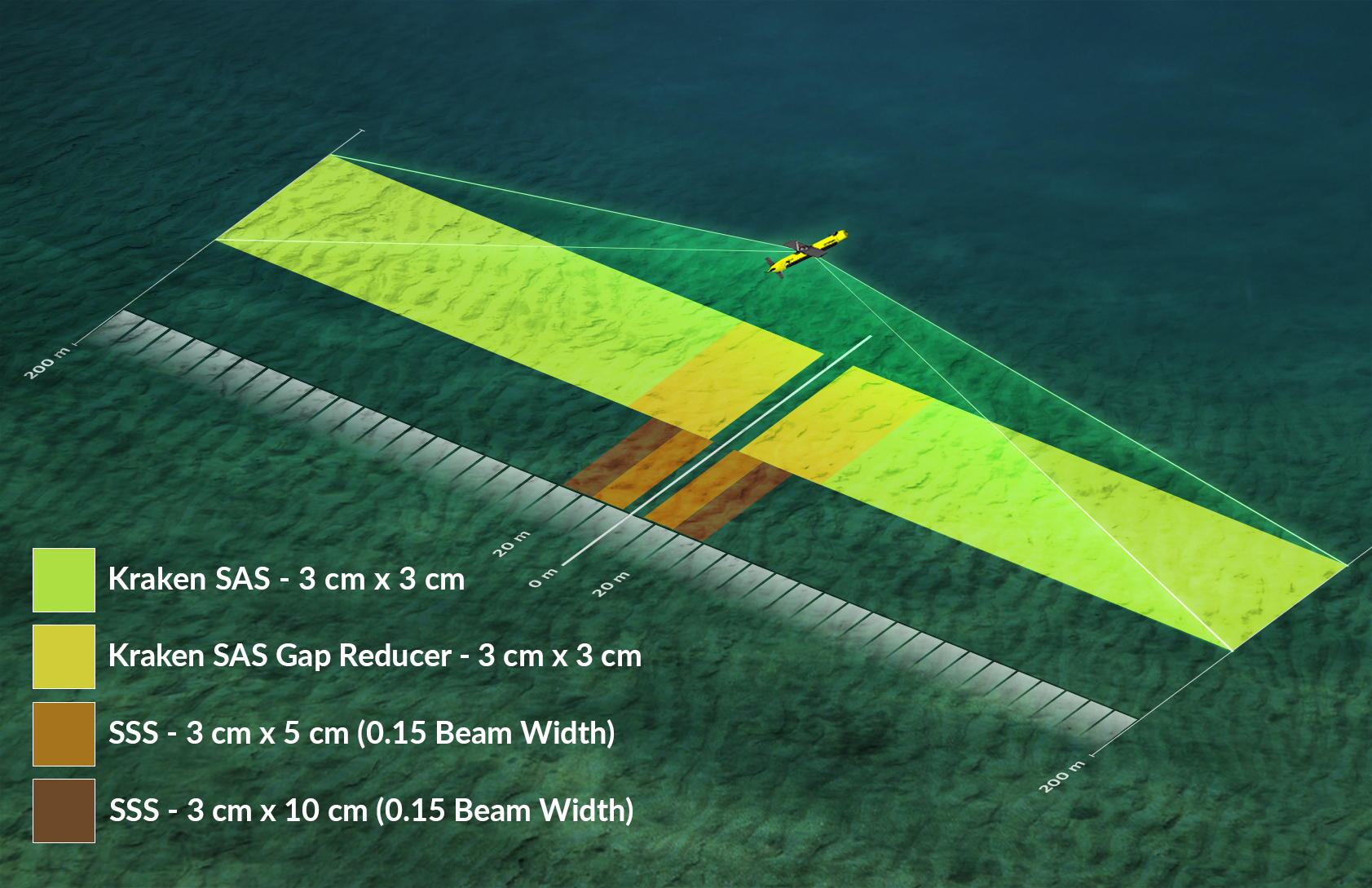
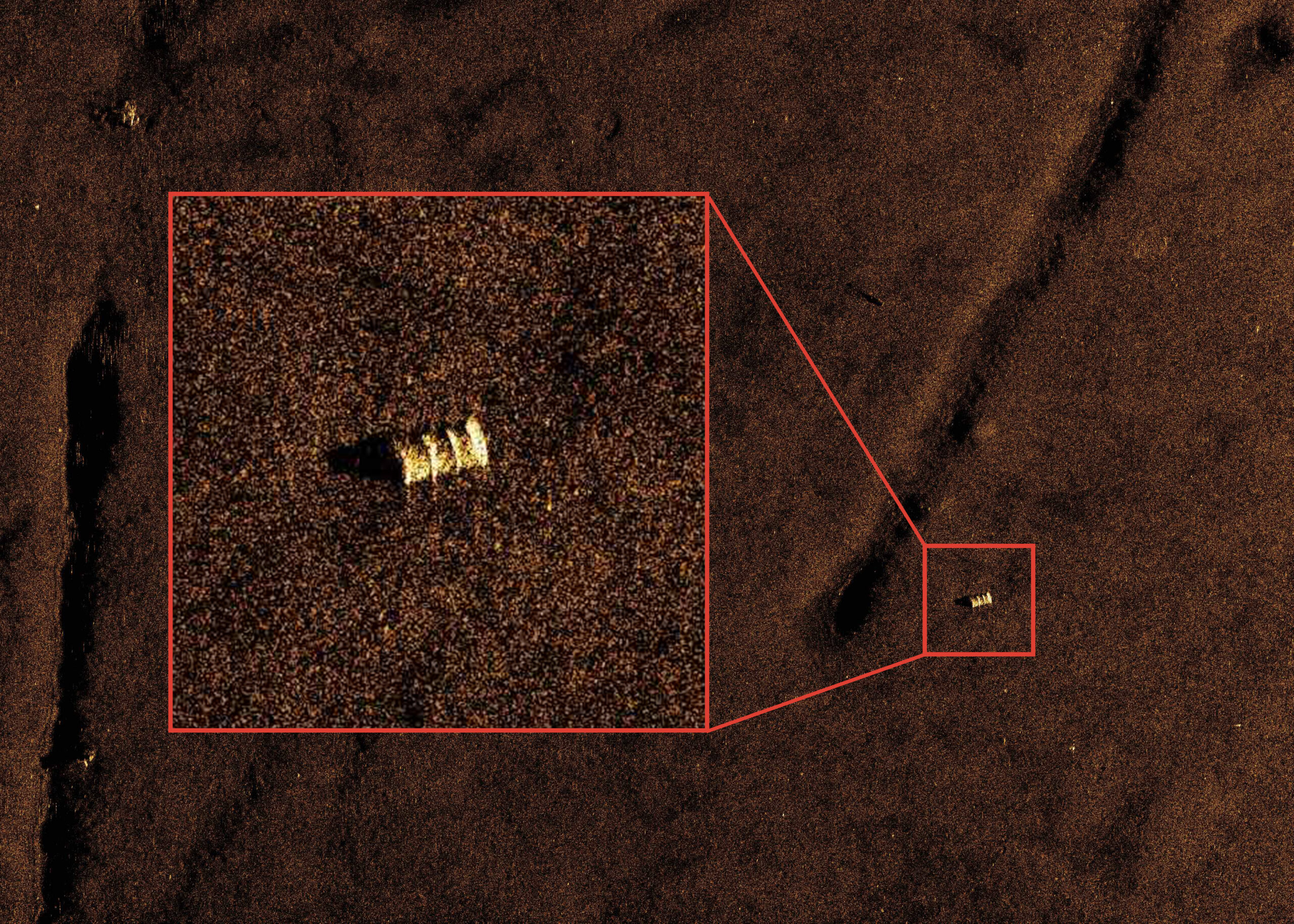
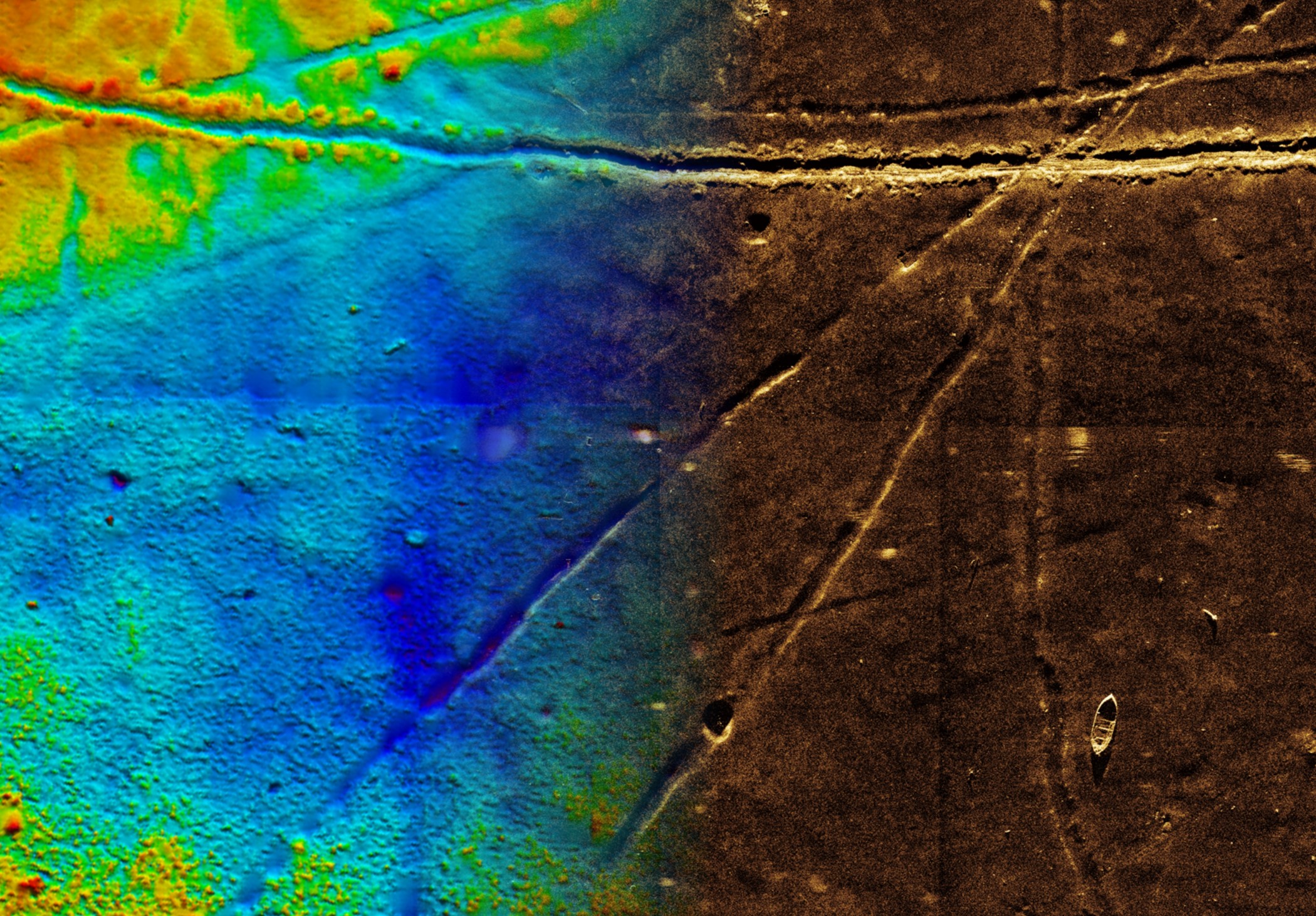
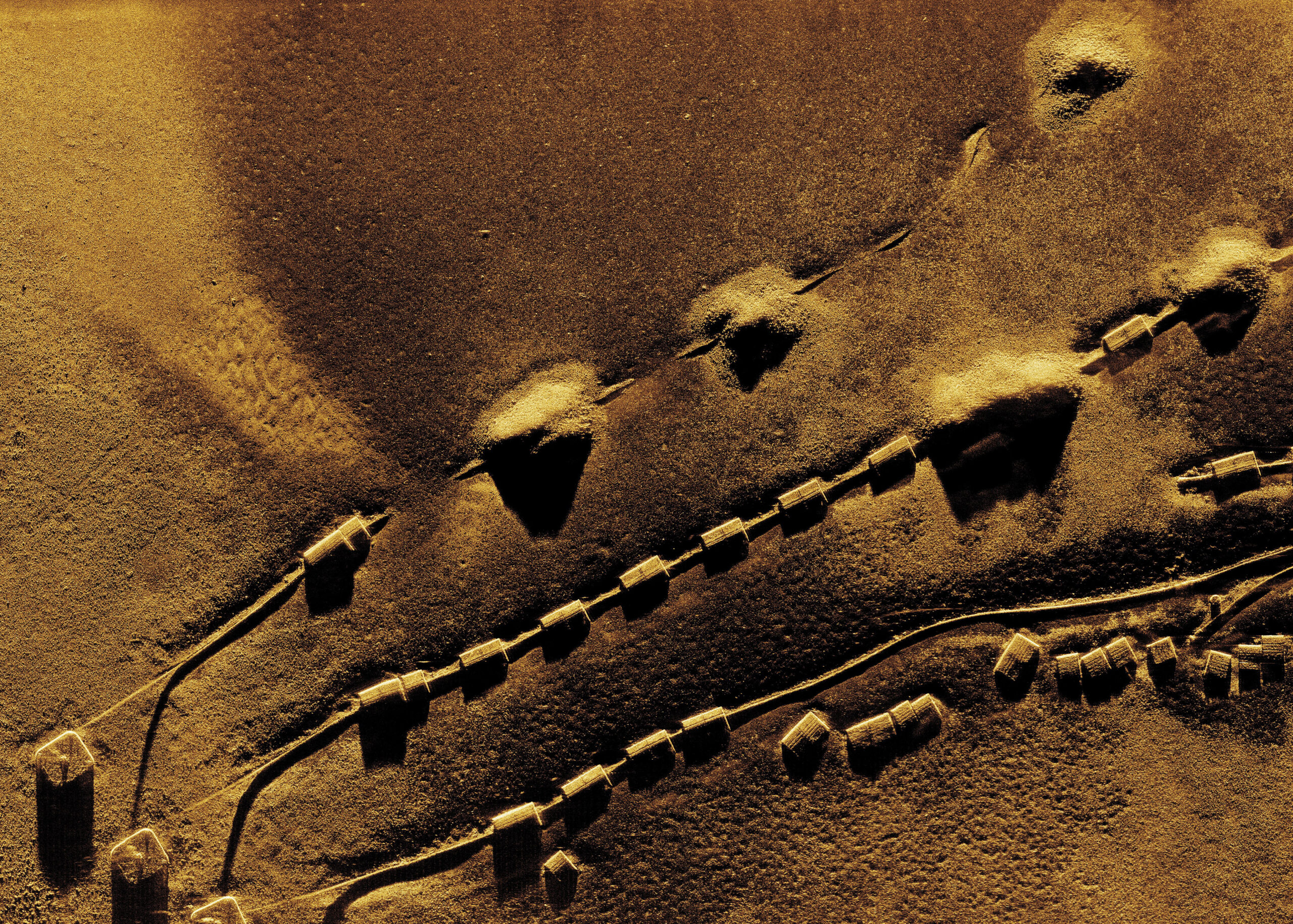
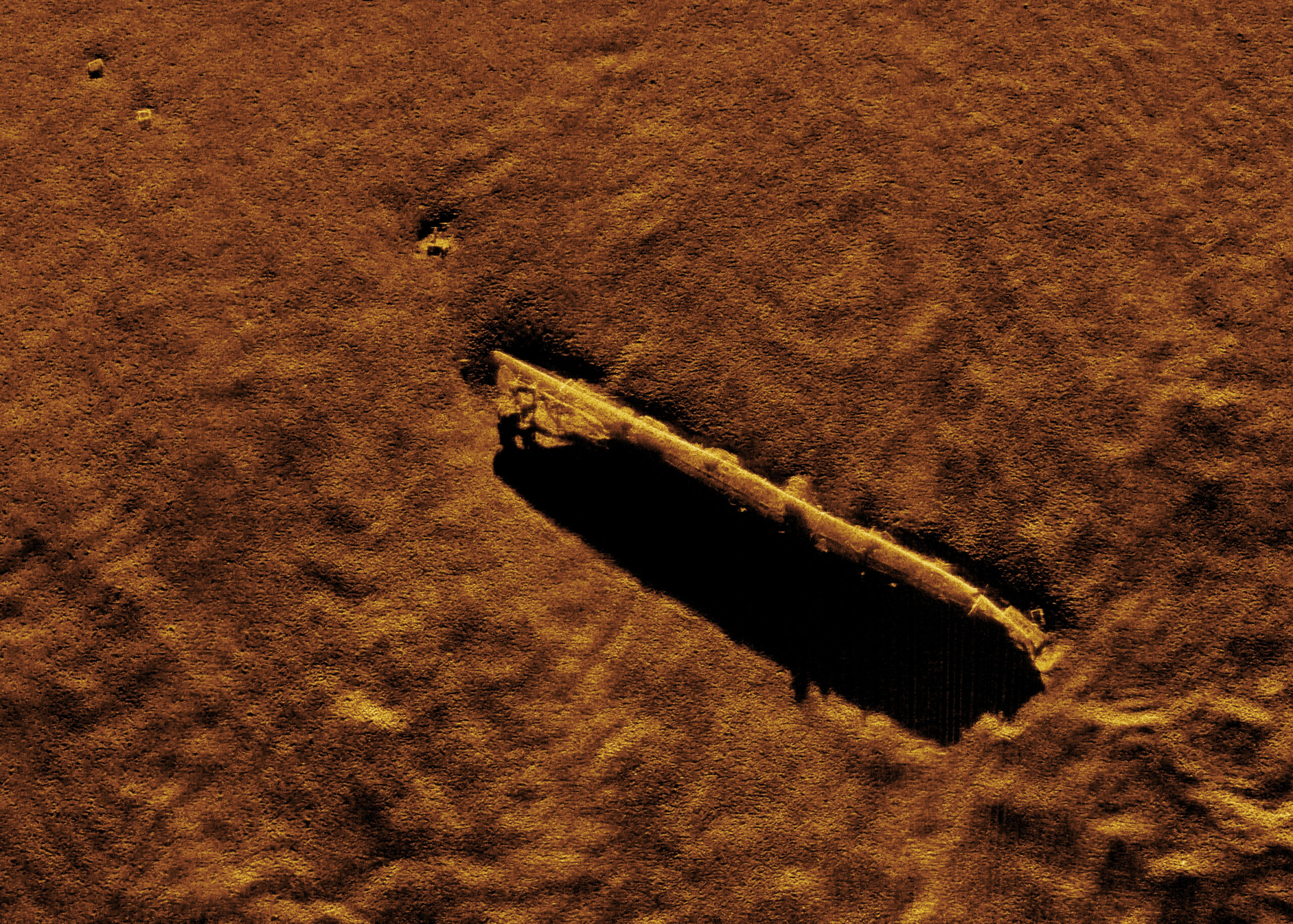
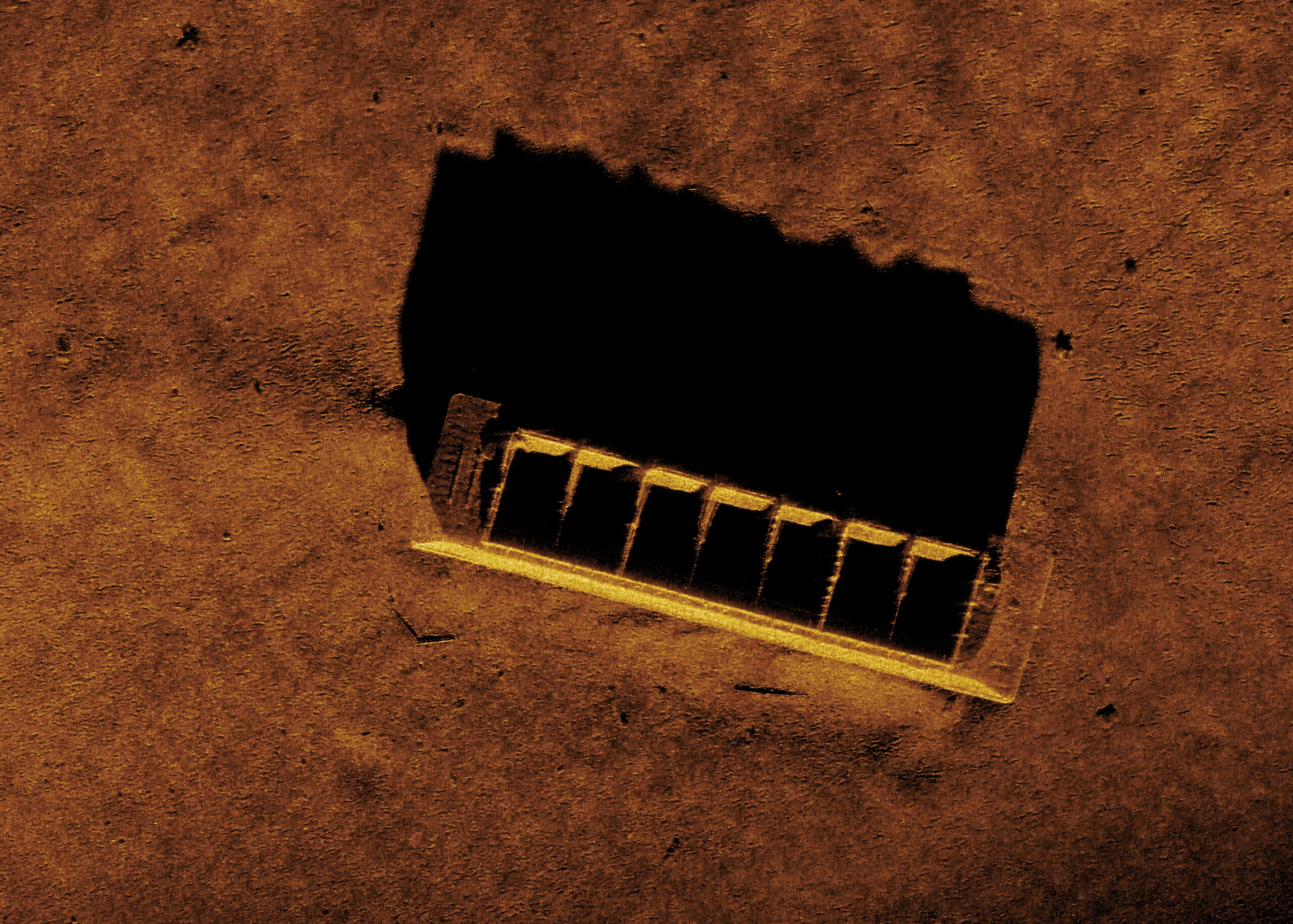
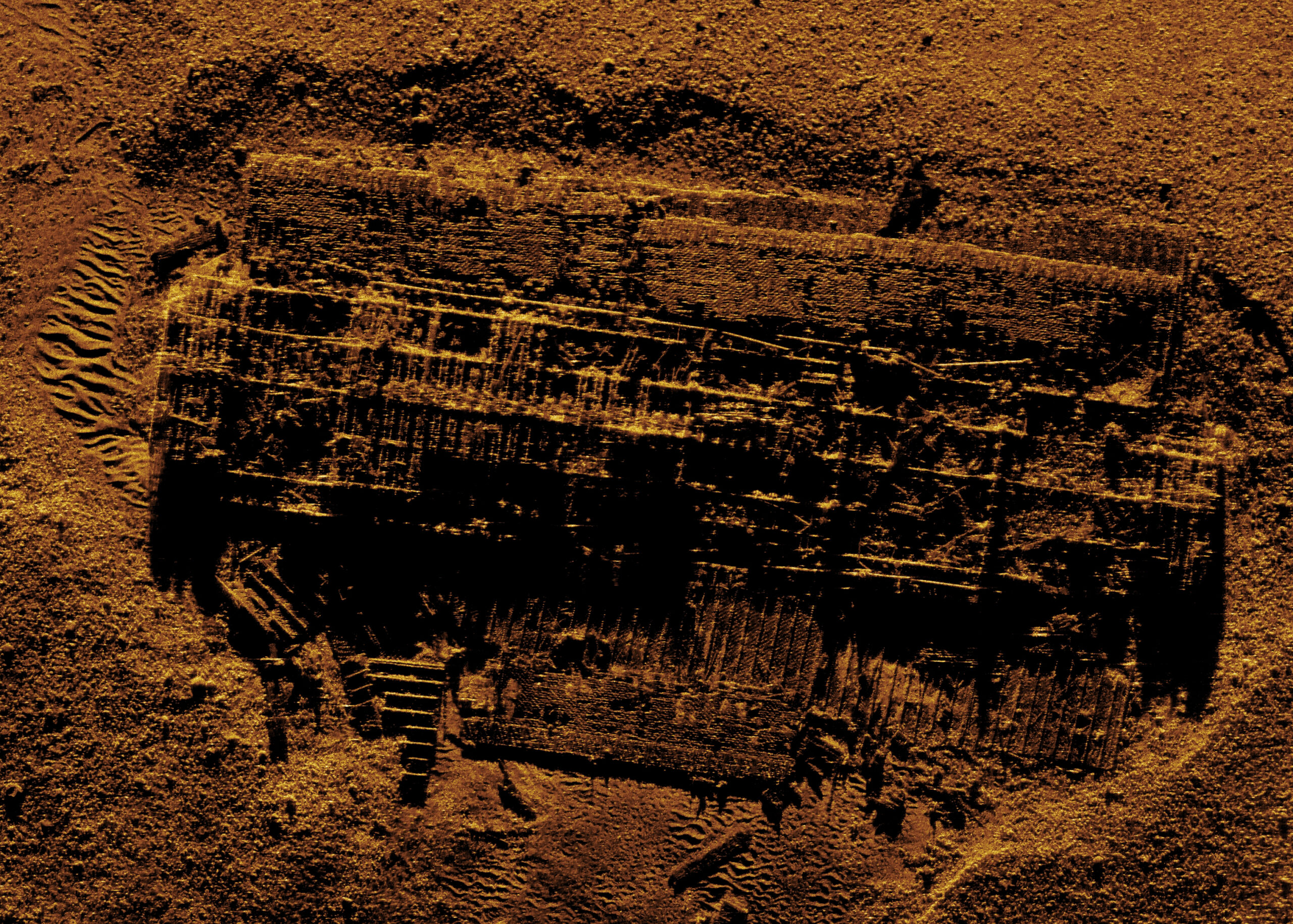
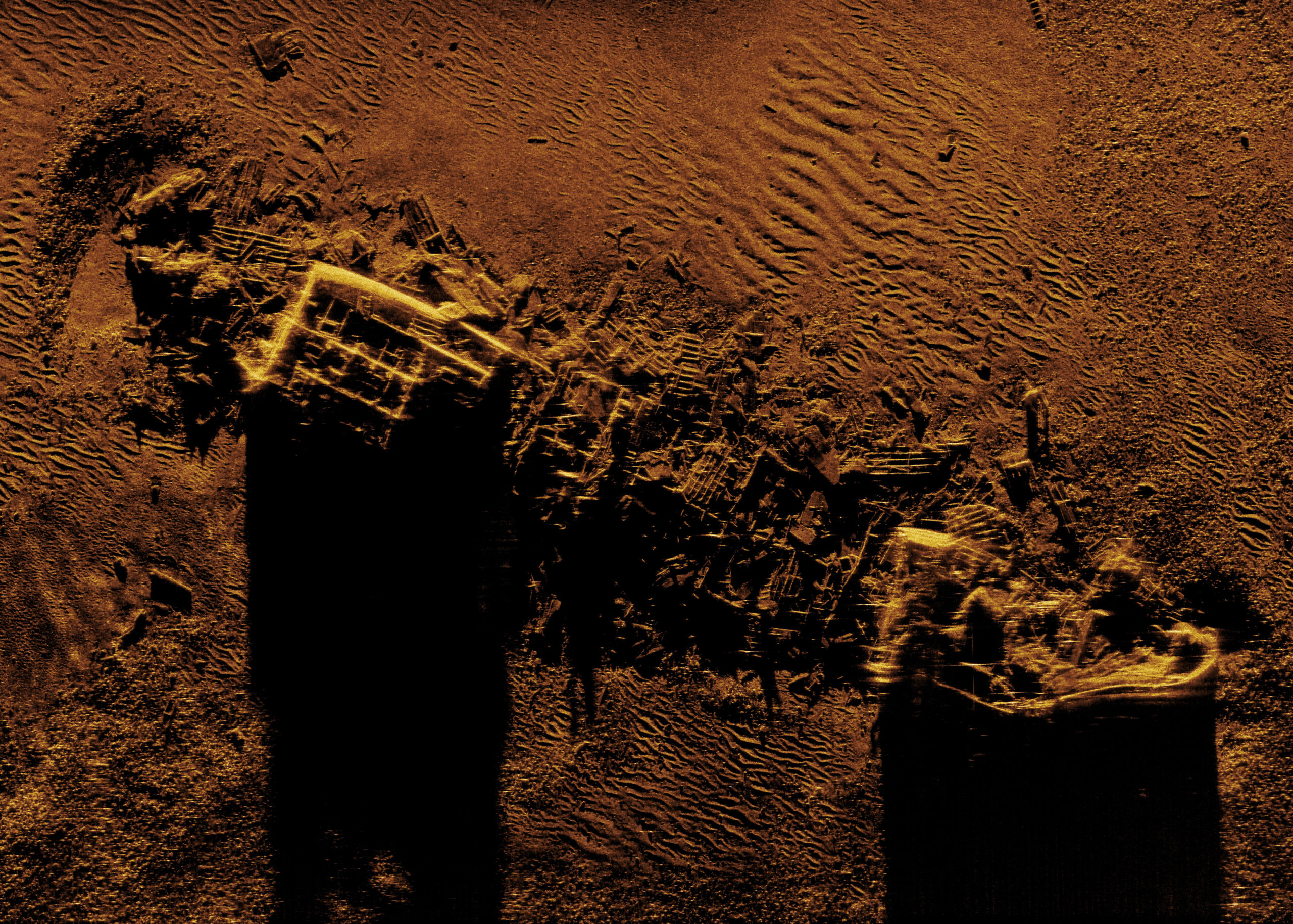
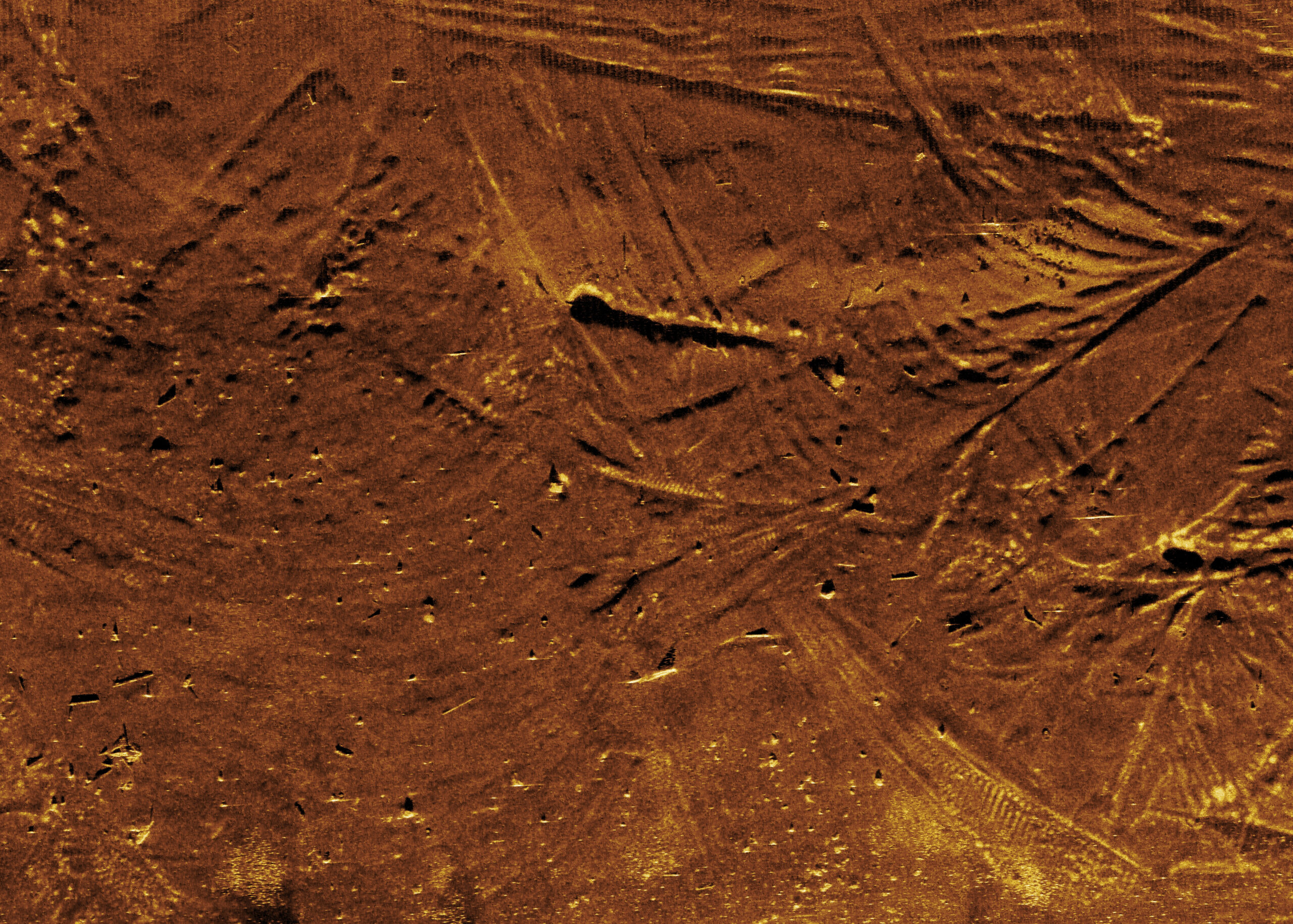
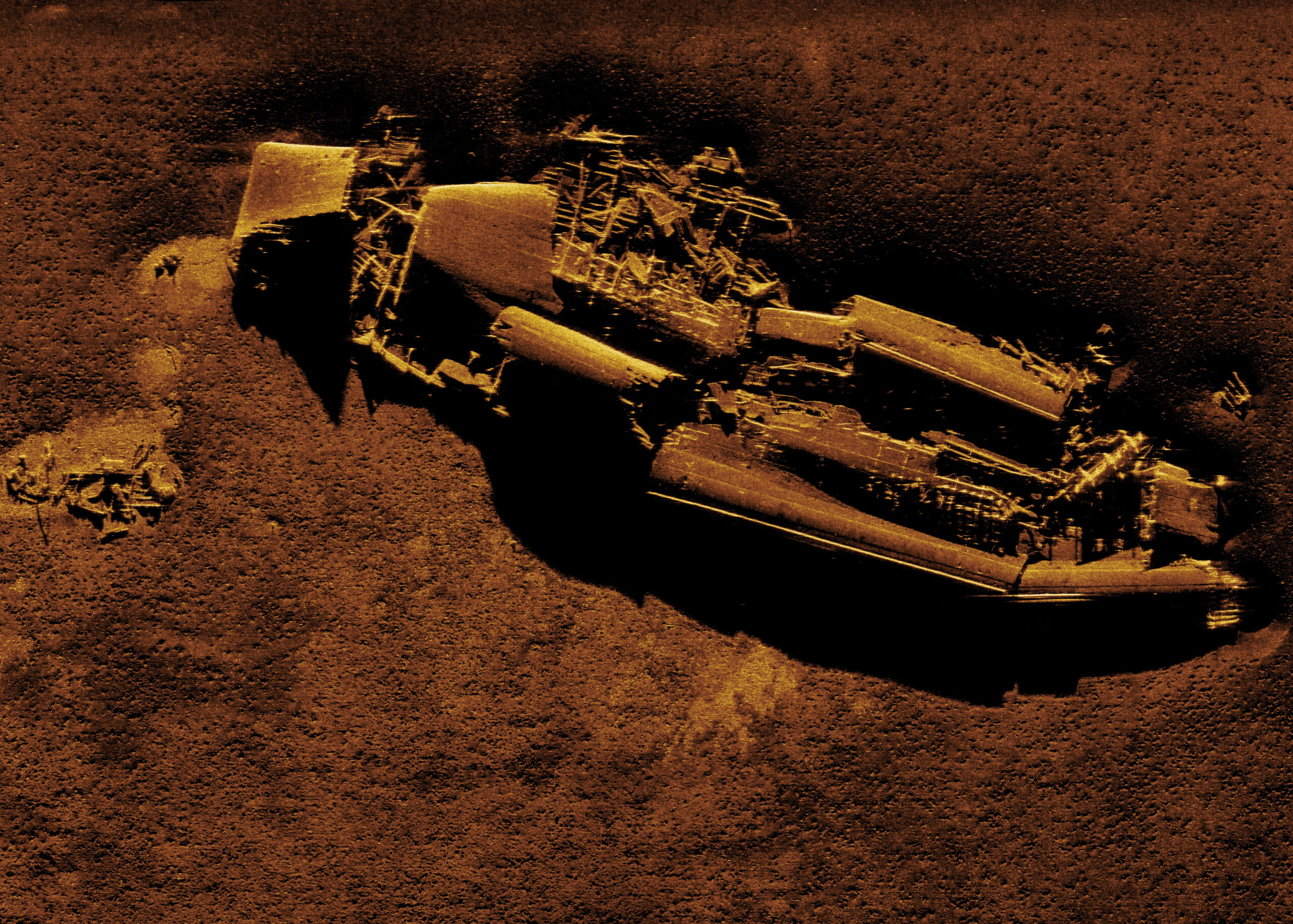
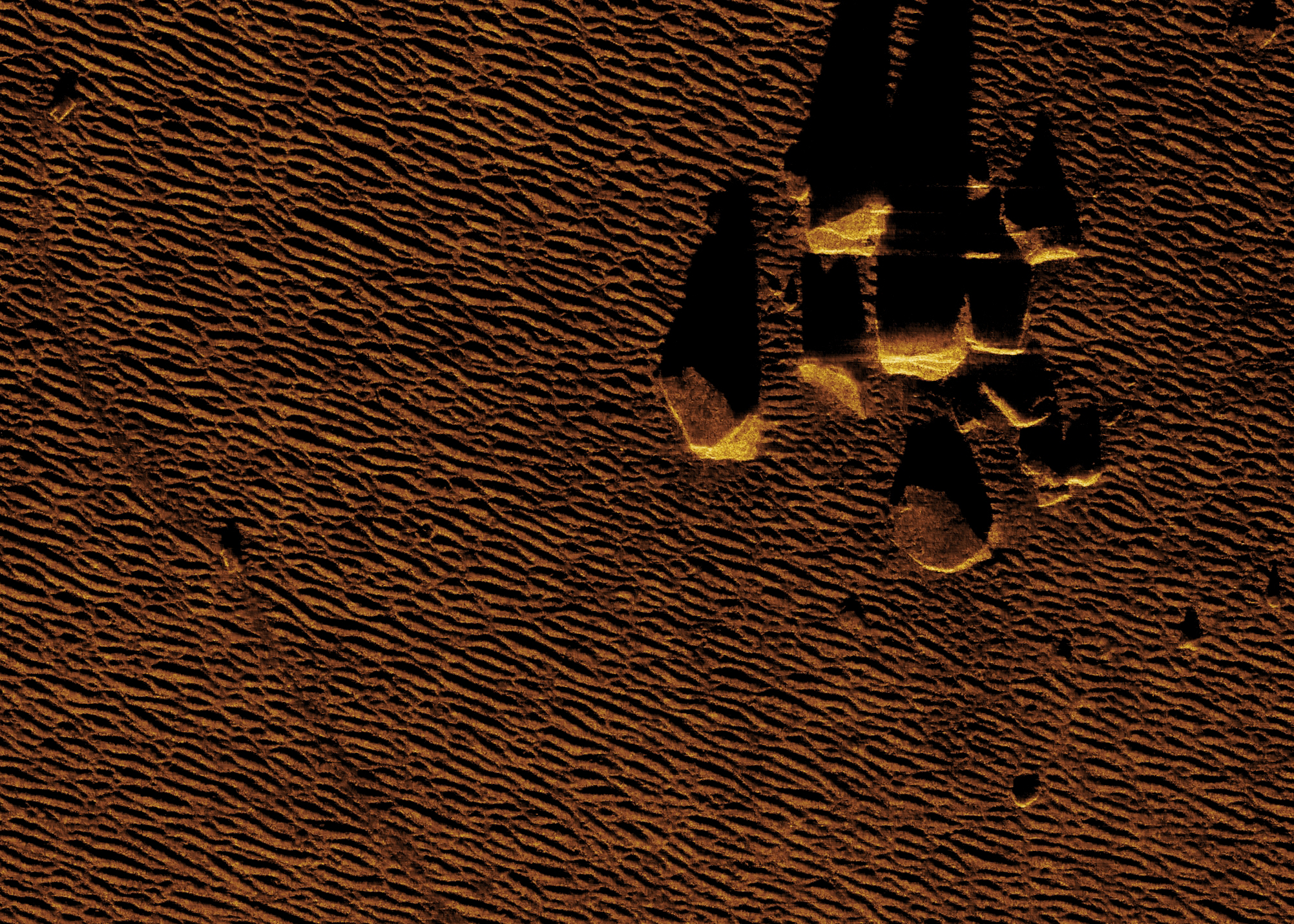
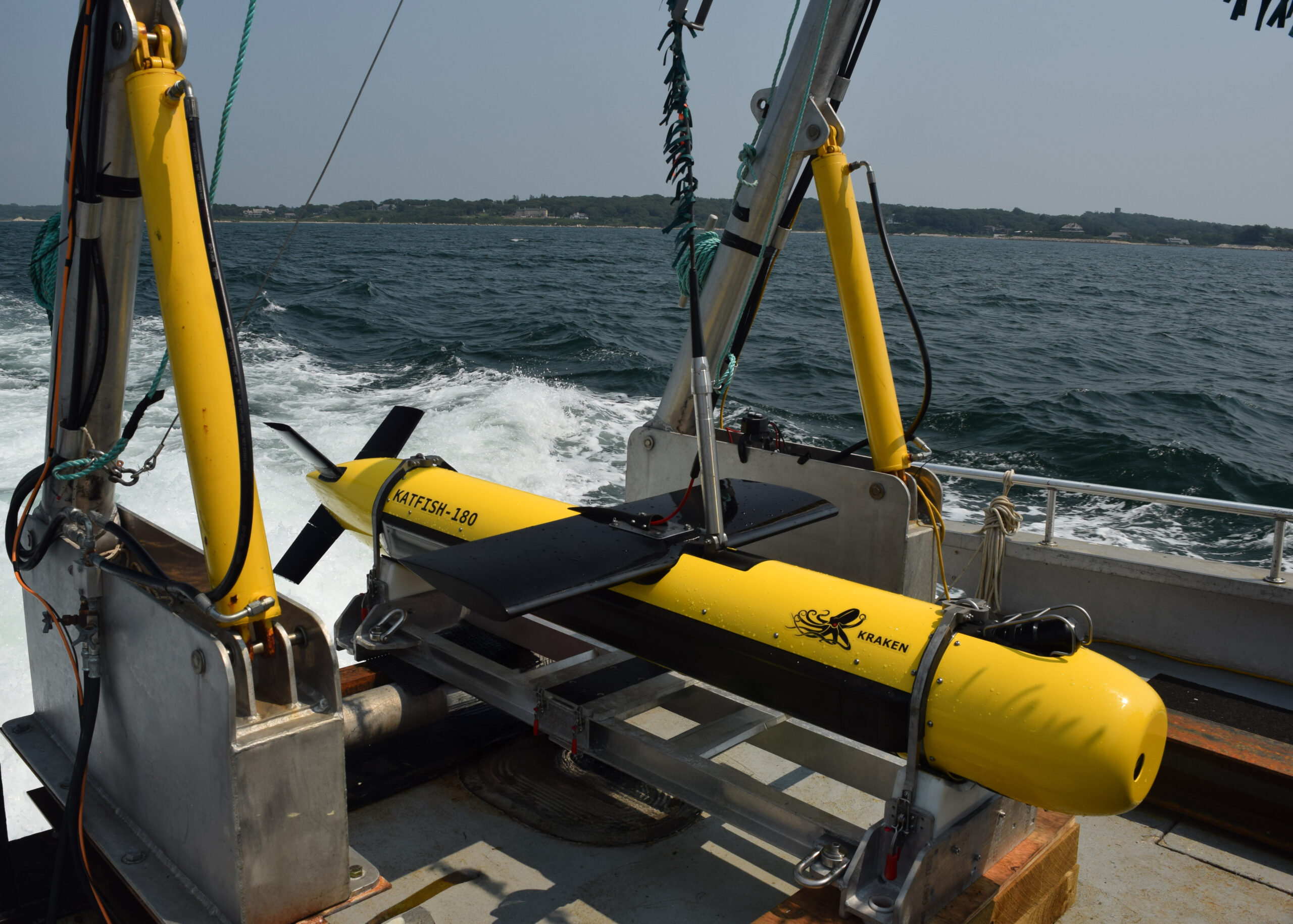
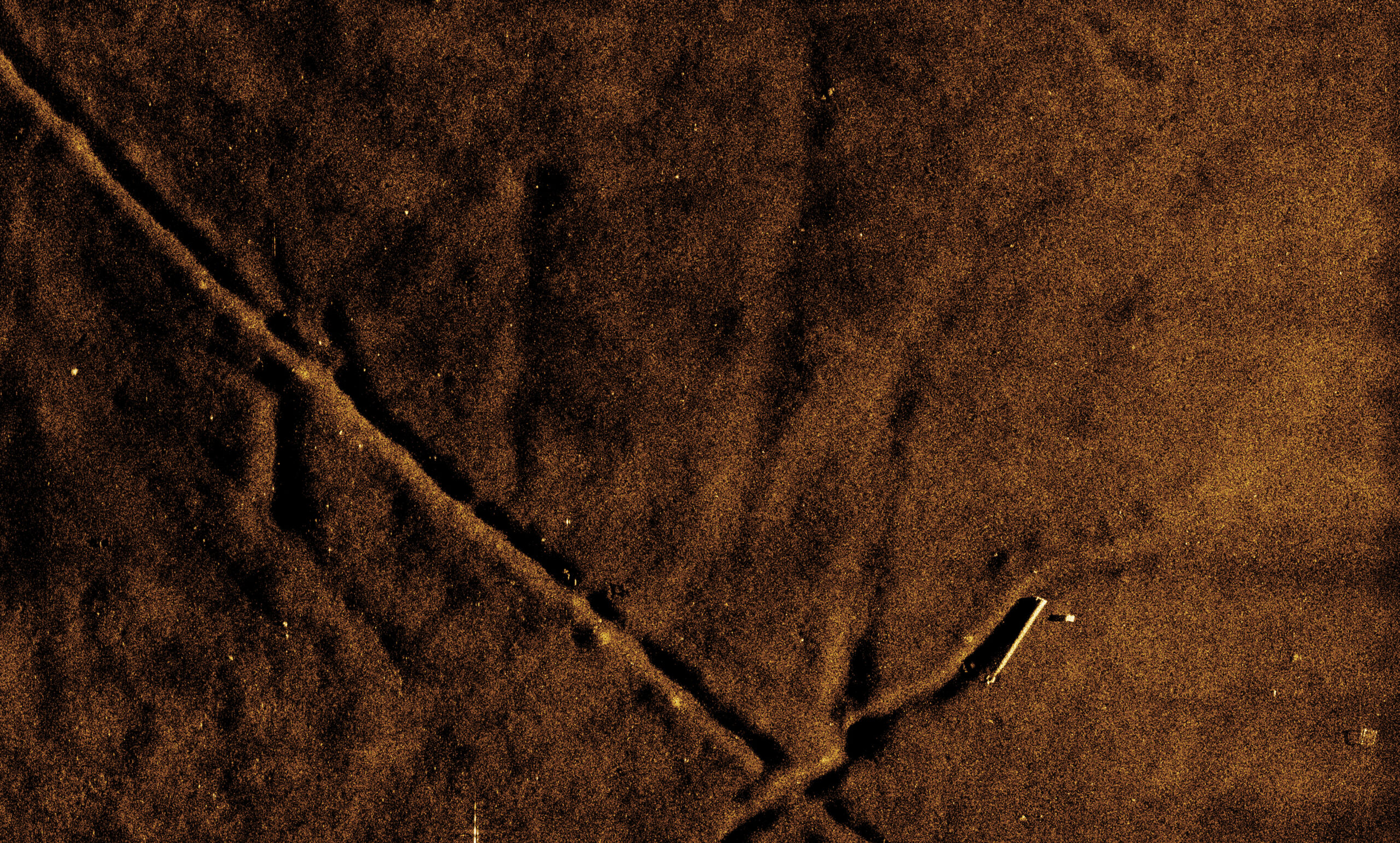
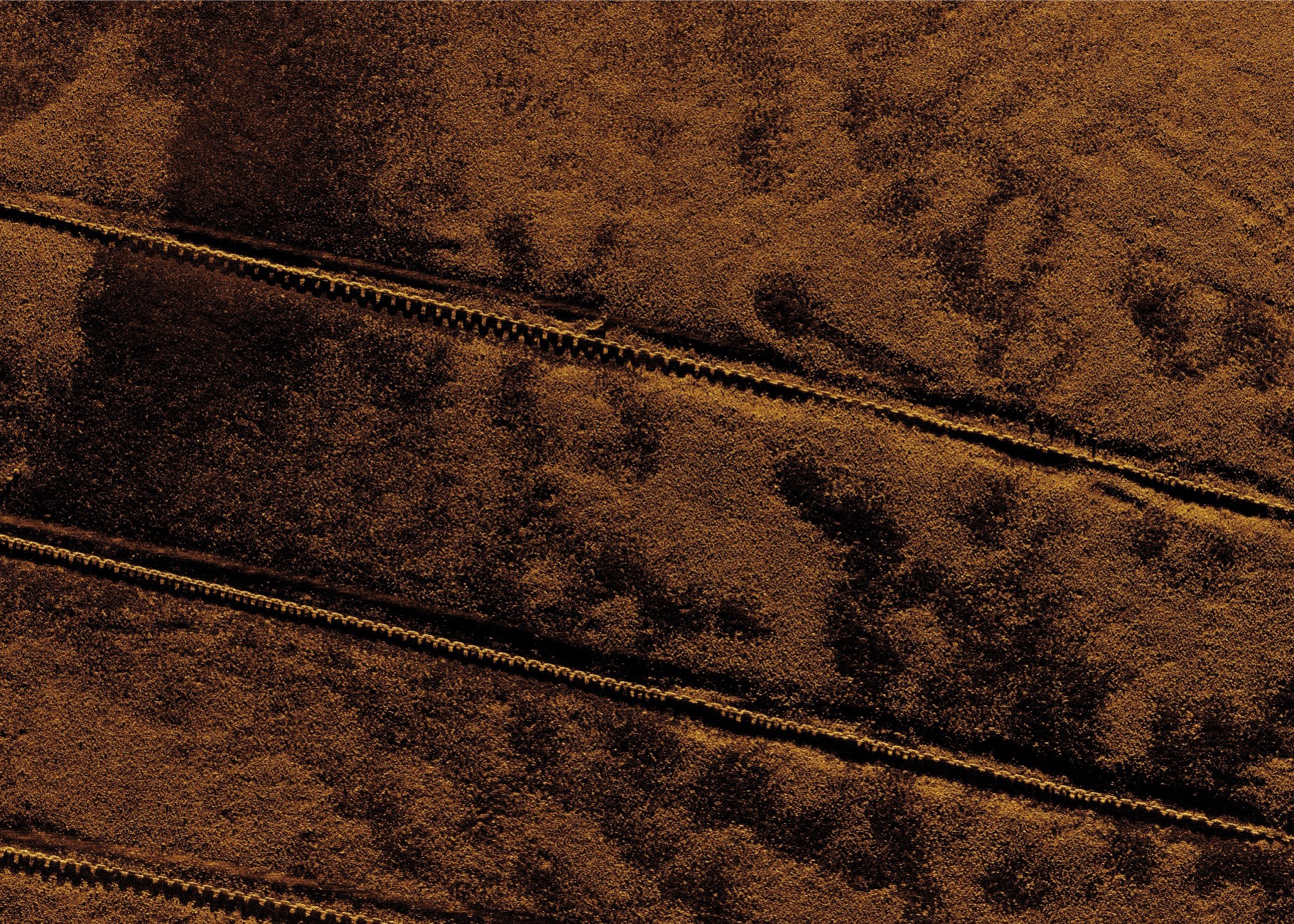
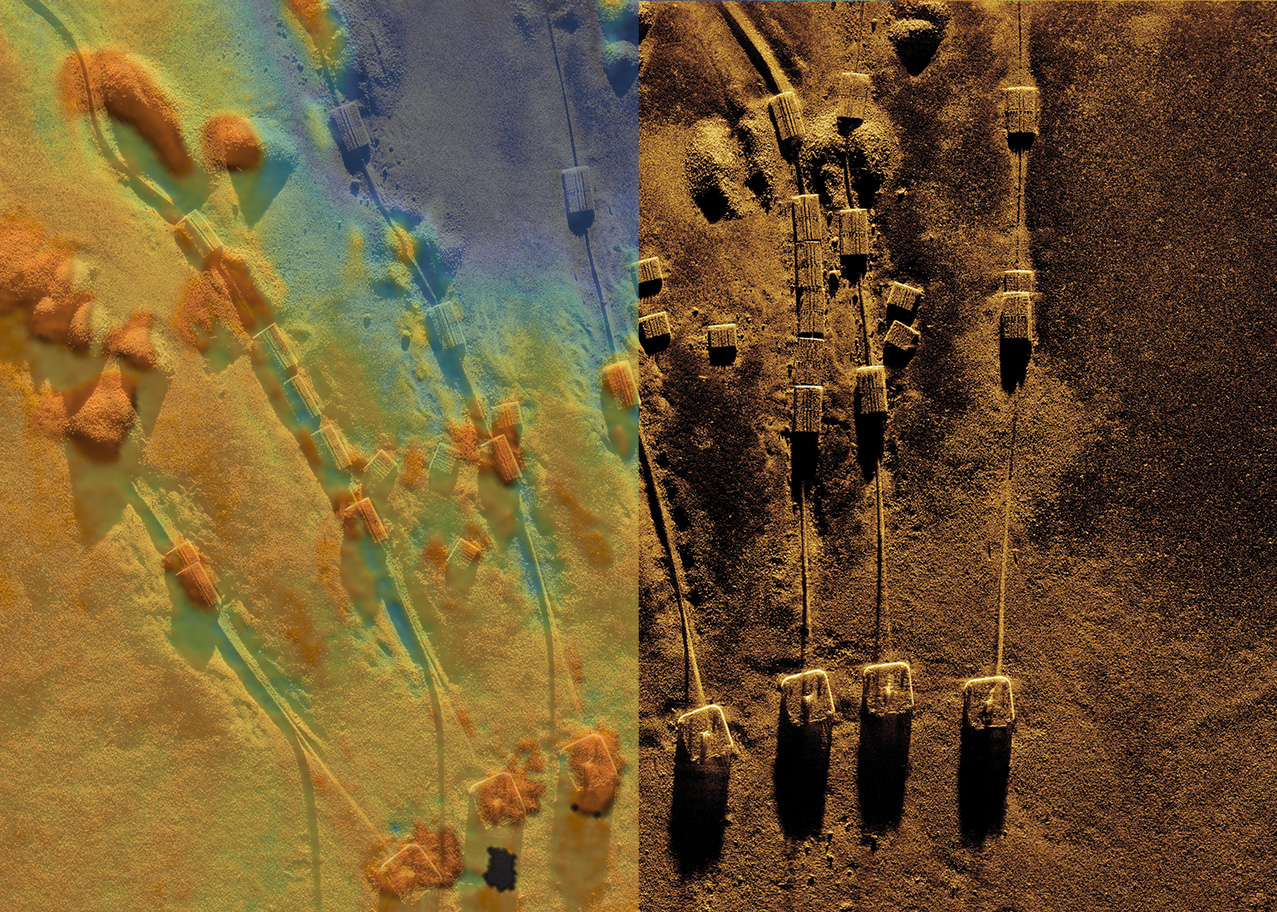
Kraken’s KATFISH actively stabilized synthetic aperture sonar (SAS) towfish system delivers ultra-high resolution data of up to 2 cm x 2 cm. The KATFISH towbody leverages articulated tailfins and an intelligent autopilot to compensate for motion, enabling high-quality data collection and large area coverage rates.
Survey Faster
Standard operations at speeds of 4-10 knots*
Survey at altitudes from 5-30 meters at depths of 300 meters
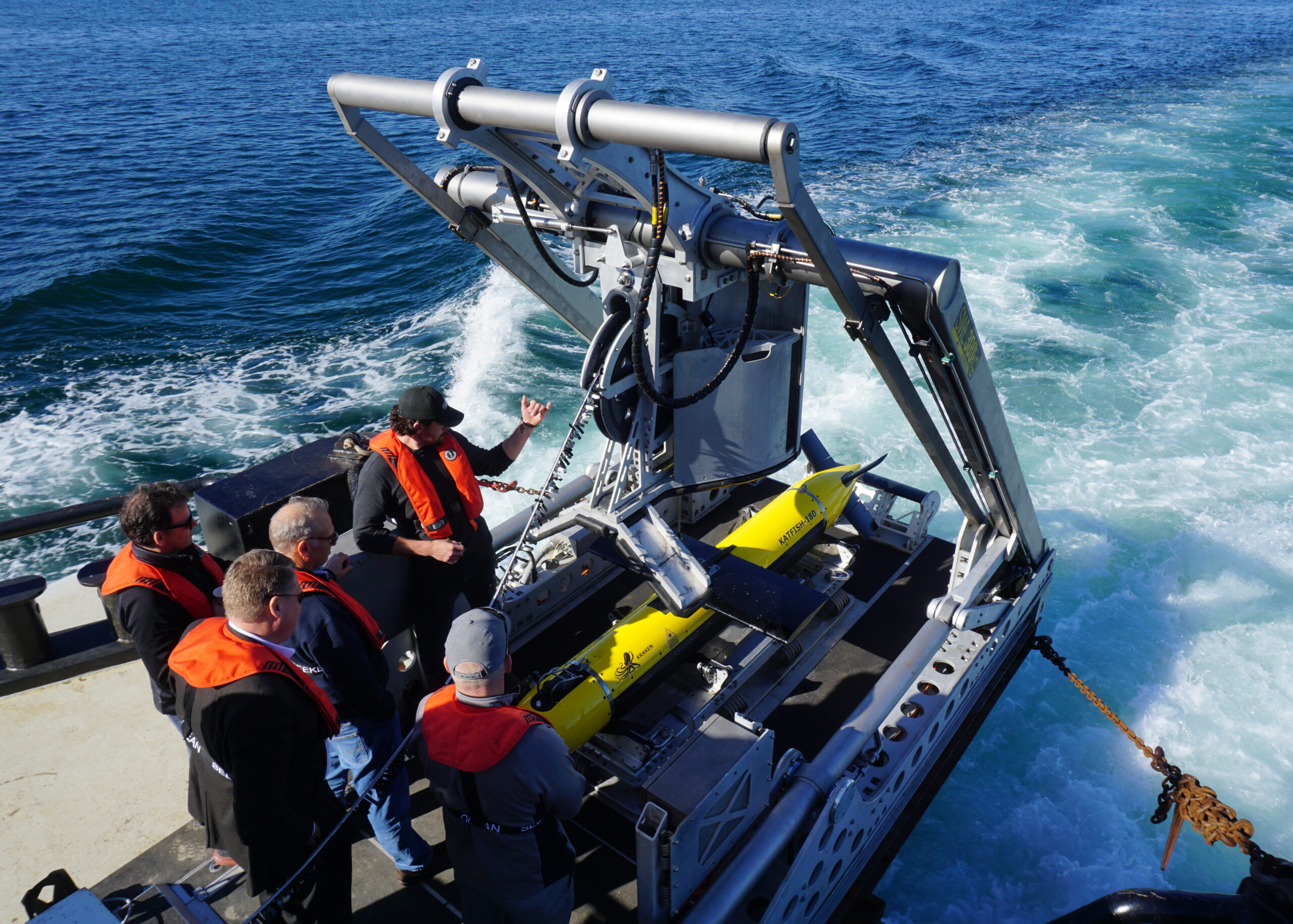
Launch and recovery is one of the highest risk operations undertaken in the application of uncrewed systems.
Kraken’s ISO20 autonomous launch and recovery system enables KATFISH towed synthetic aperture sonar to be brought aboard a host vessel safely, efficiently, and without damage.
Kraken’s compact USV LARS is designed for smooth, safe, and robust launch and recovery operations from small USVs without human intervention.
Autonomous Operations
Fully unmanned launch and recovery process
Intelligent Winch Control
Perform safe and effective launch and recovery in harsh environments through measurement of the surface vessel and KATFISH motion
Flexible Deployment
ISO20 LARS designed for modular, rapid integration on vessels of opportunity with ISO20 footprint
USV LARS Designed for integration on USVs from 11+ meters


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}