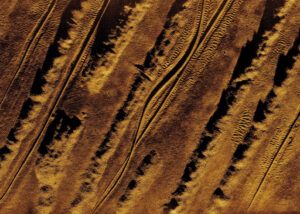
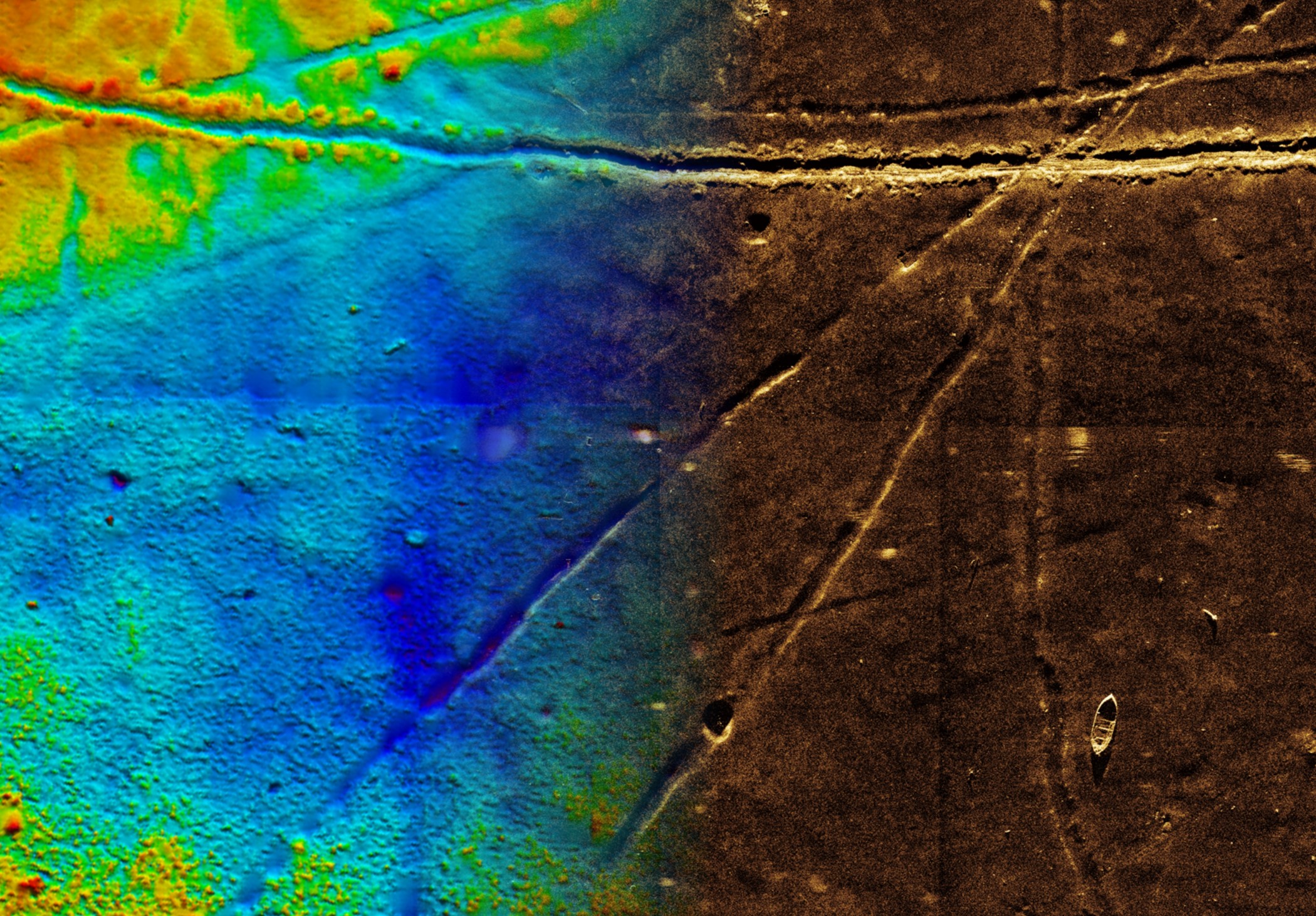
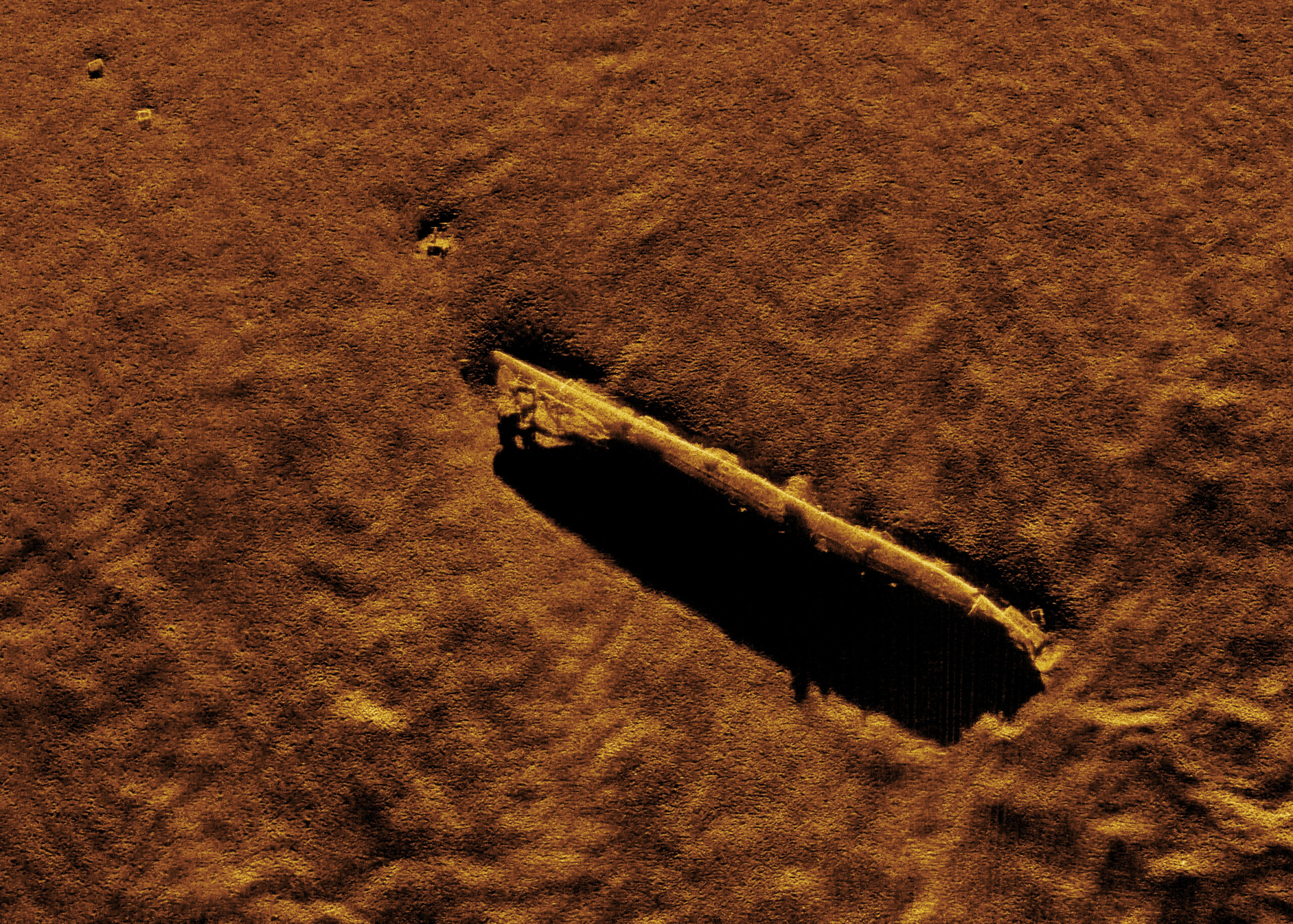
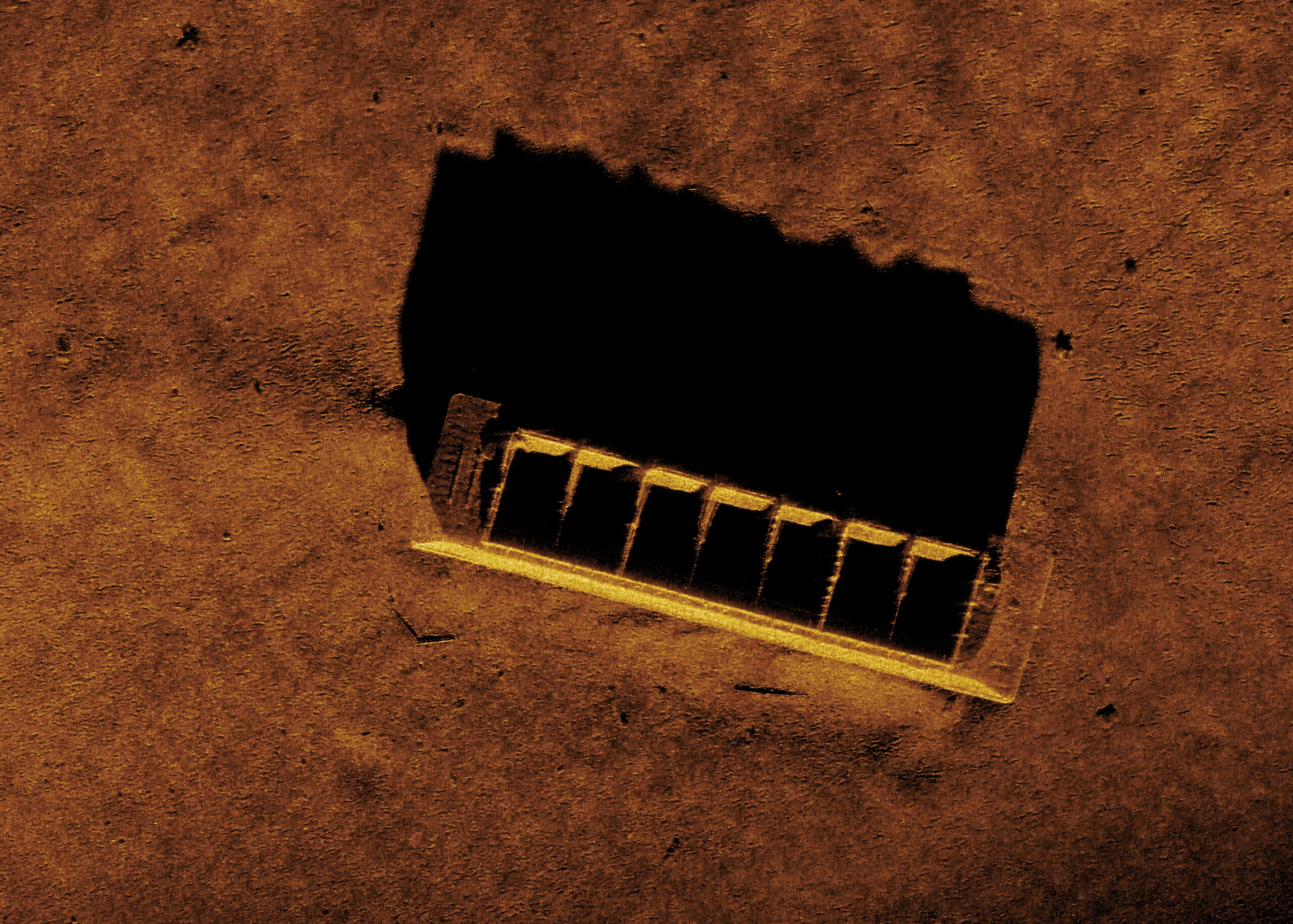
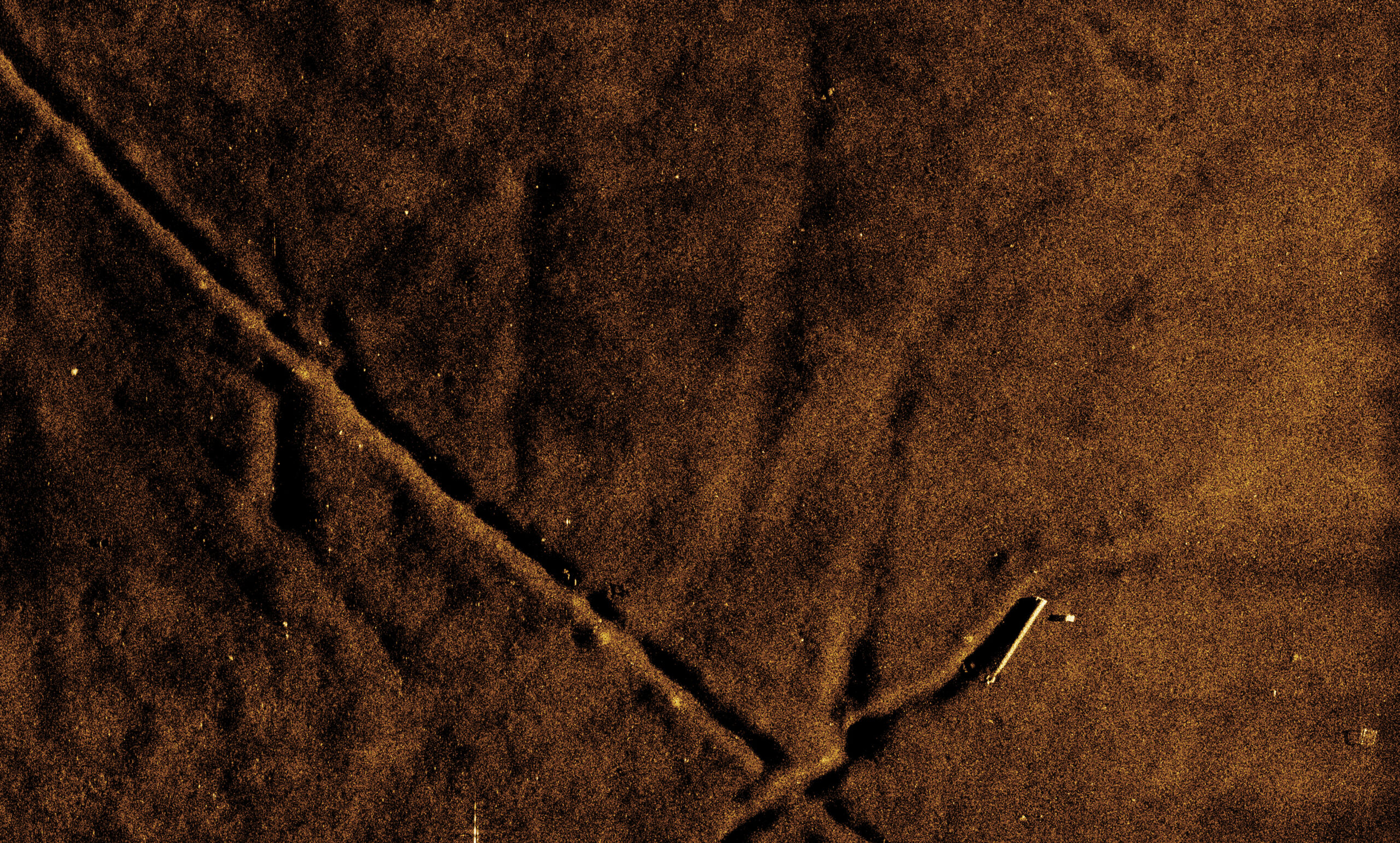
Kraken Synthetic Aperture Sonar (SAS)
is a technology evolution, integrating
the capability to perform imaging and
bathymetric mapping simultaneously,
while delivering significantly higher
resolution, range, and one of the
industry’s best Area Coverage Rates
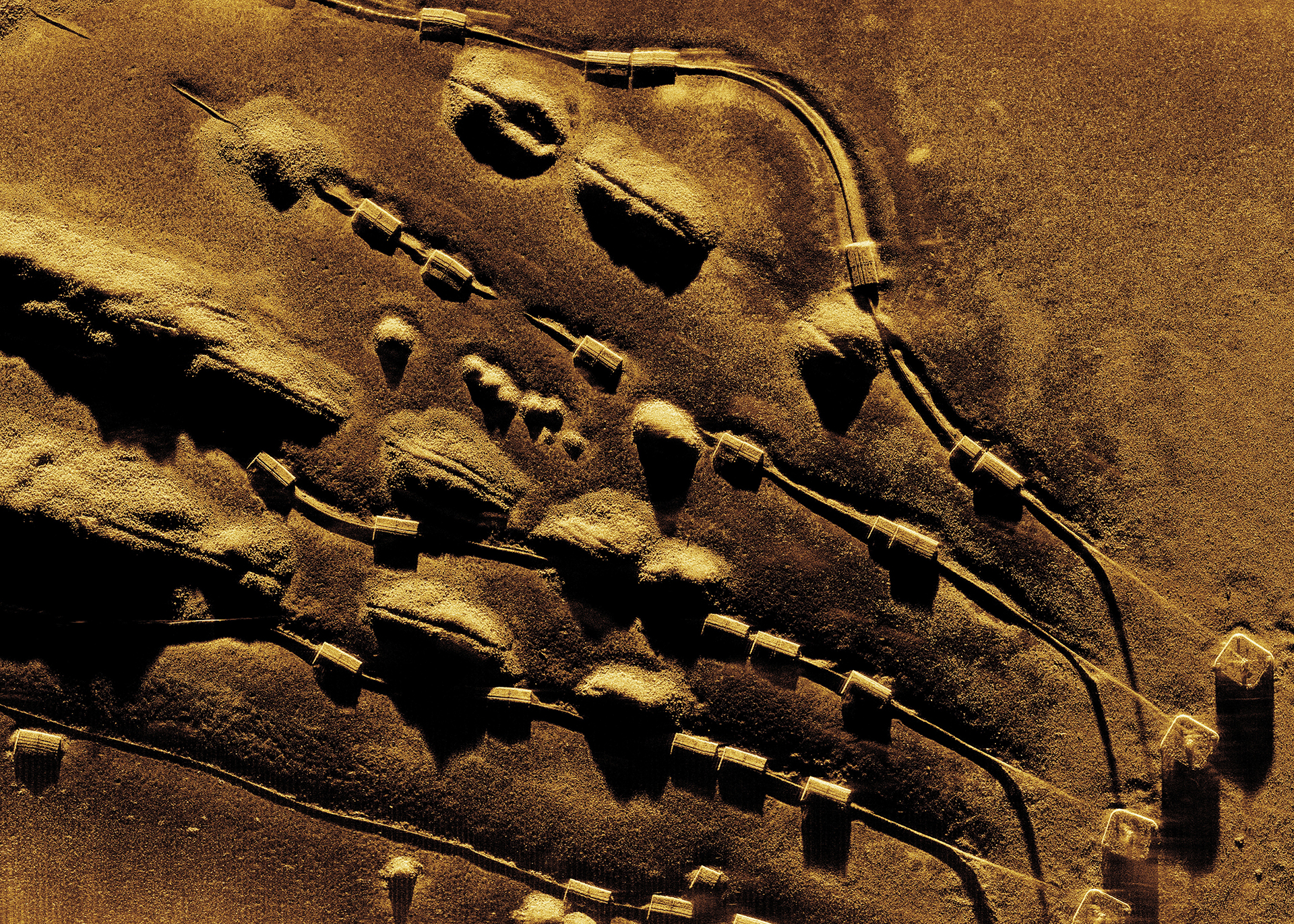
(ACR). From mine countermeasures
and port and harbour security to
infrastructure integrity surveys
and broad area habitat mapping
campaigns, Kraken SAS provides
higher-grade information that reduces
the cost and time required to make
critical decisions.
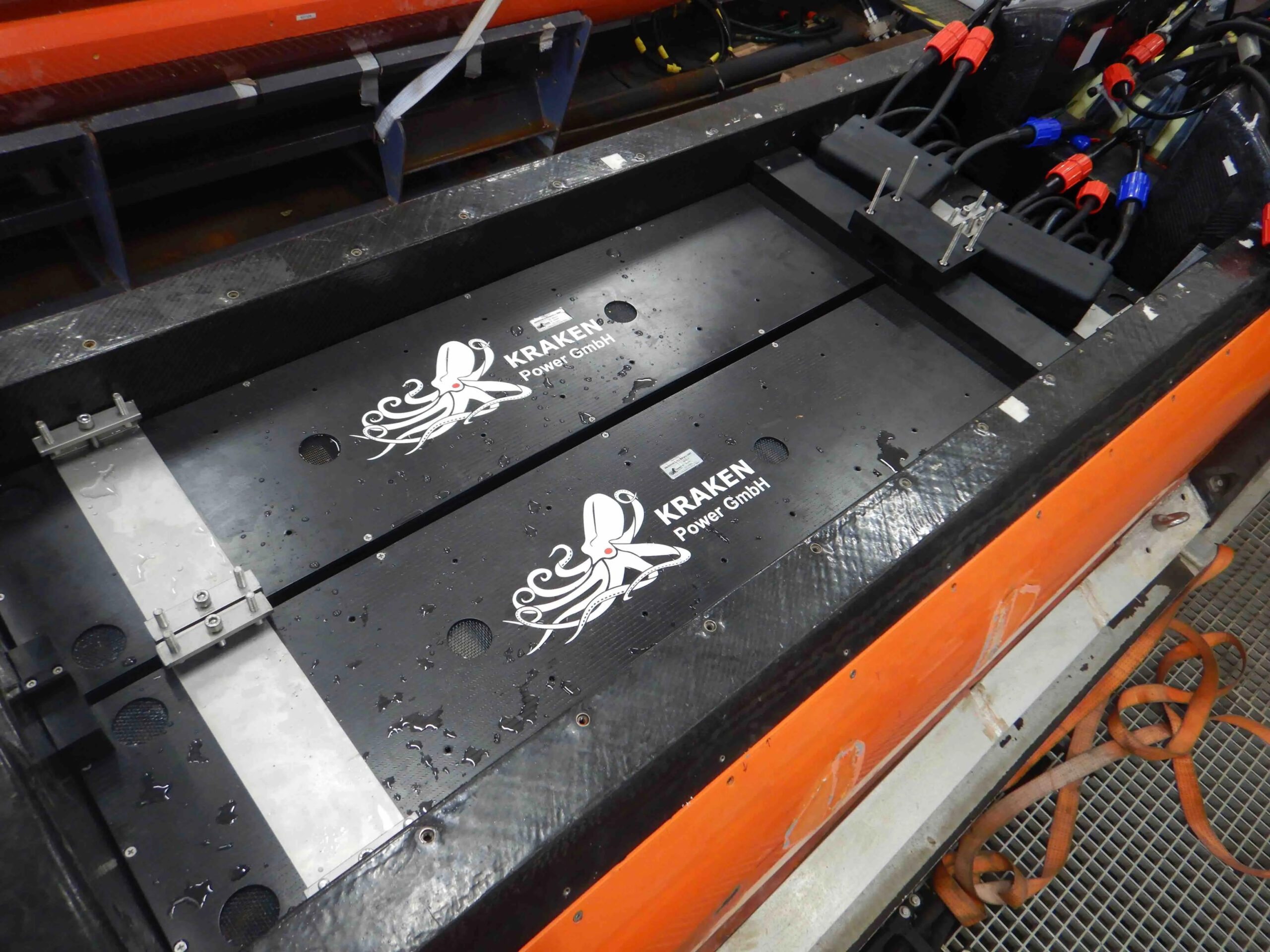
Flexible, Modular Design
Integrate into vehicles ranging from man-portable to large diameter
Configurable array size: 60 cm, 120 cm or 180 cm modular array options
300 m, 1000 m, or 6000 m-rated options
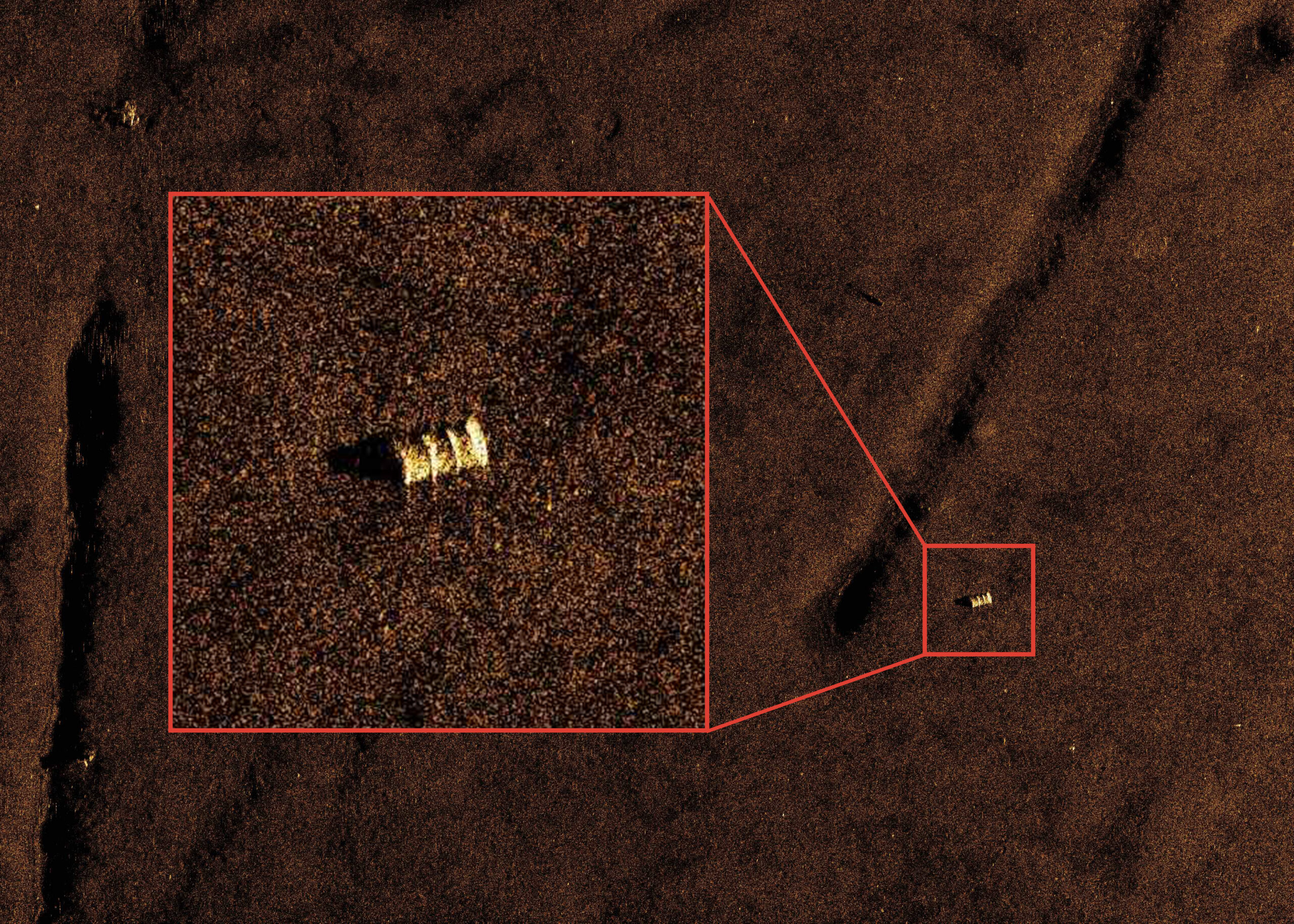
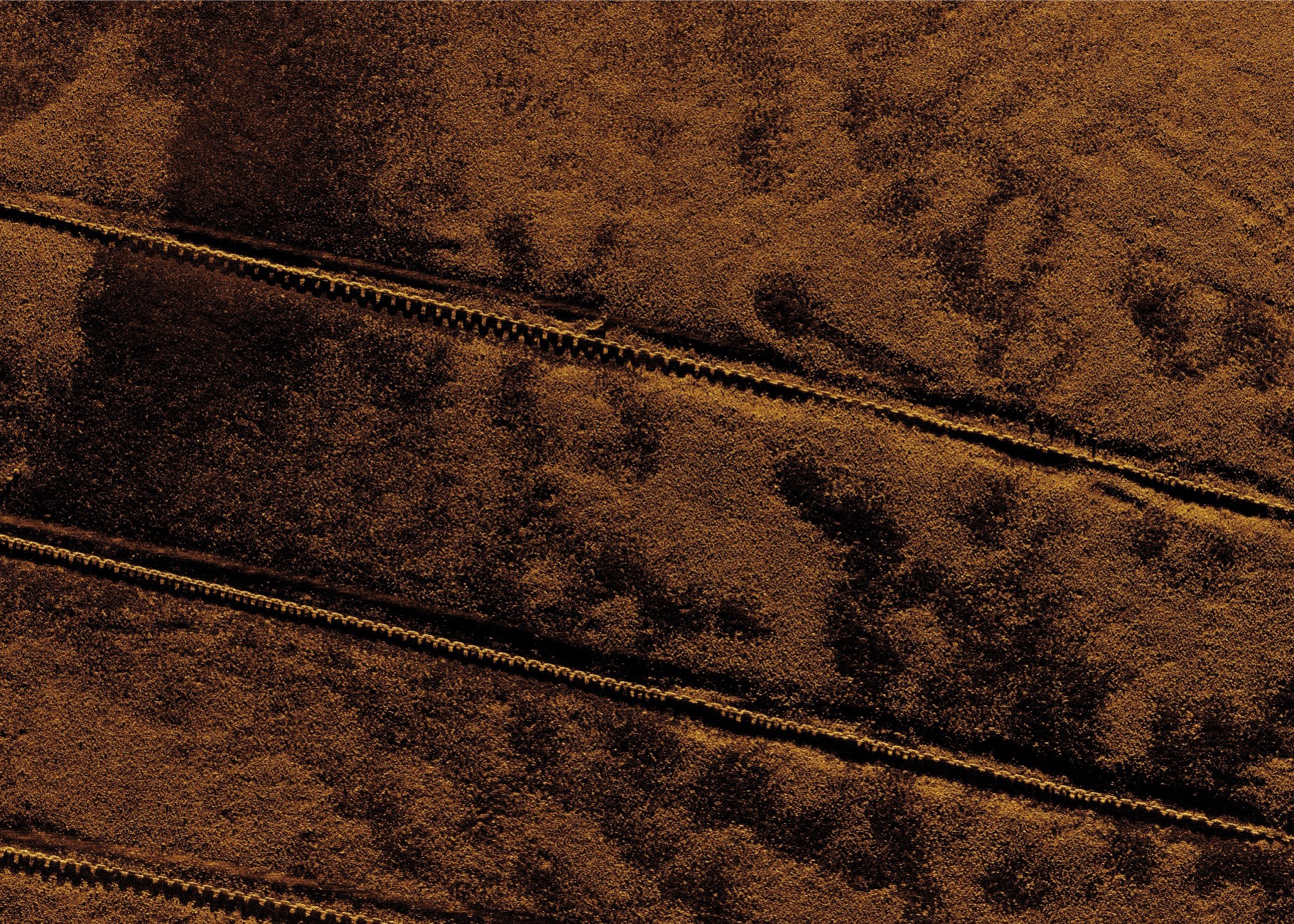
Maximize Area Coverage Rate
Ranges up to 200 m per side
Improve Survey Results
Constant resolution across the entire swath
Real-time SAS resolution of 3 cm x 3 cm
Post-processed SAS resolution of 2 cm x 2 cm
Simultaneous bathymetry and dynamically focused sidescan sonar data
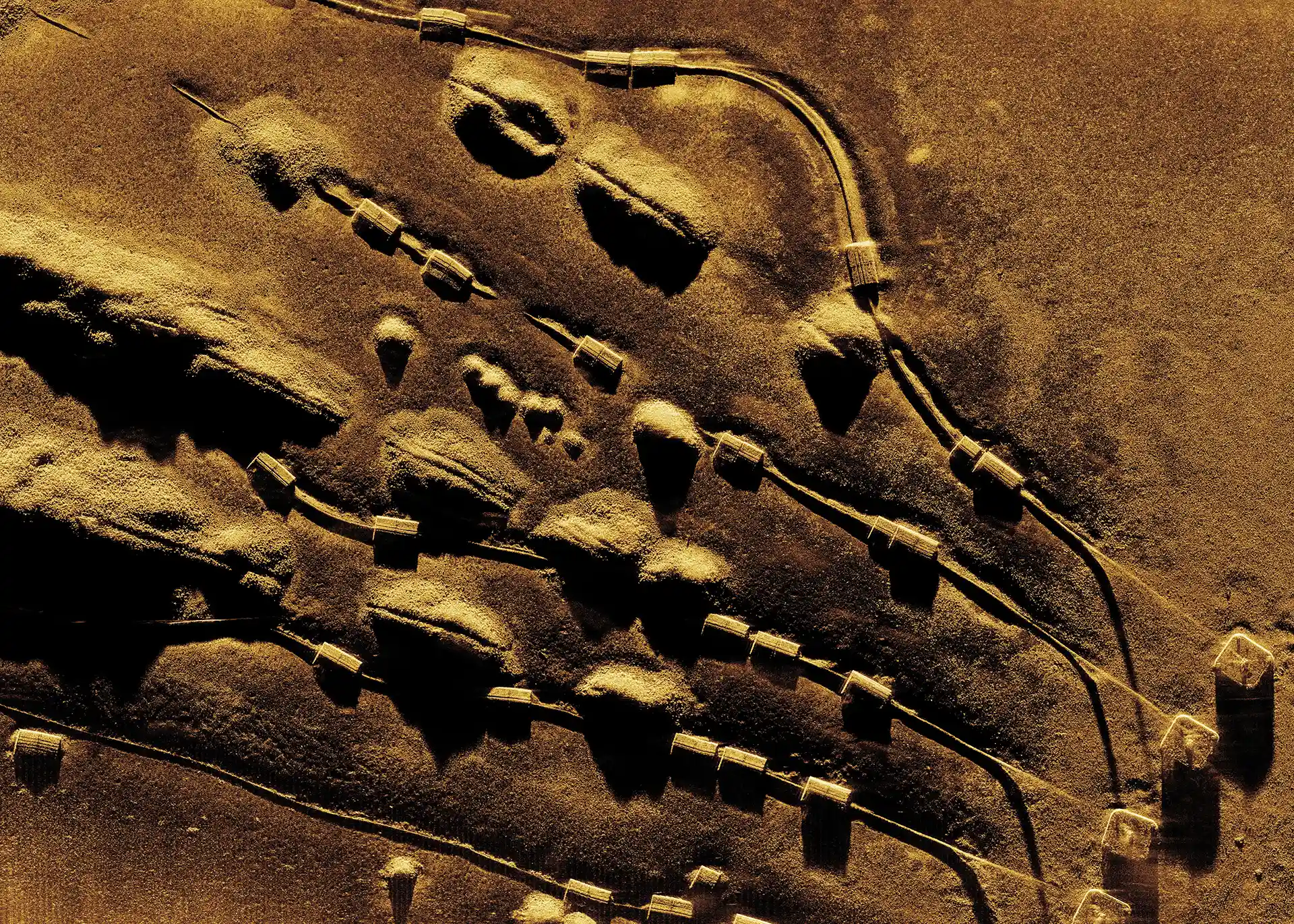
Increase Efficiency
Real-time full-swath processing to enable embedded automatic target recognition (ATR) and advanced autonomy features
Increased area coverage rate reduces mission time
Reduces mission duration 2-3x compared to sidescan sonar
Kraken’s lightweight man-portable synthetic aperture sonar (MP-SAS) brings increased capability to low logistics, small class UUV surveys. Kraken MP-SAS uses Kraken SAS technology as a foundation, with modifications to reduce size, weight, and power.
Compact, Versatile Design
Fits small UUV diameters of 7.5+ inches and rated to 300 m depth
Lightweight transducers provide a range of up to 100 m per side
Modular payload section can be added and removed quickly in the field without recalibration
Kraken’s KATFISH high speed, actively stabilized synthetic aperture sonar towfish operates at speeds up to 10 knots providing increased area coverage rates.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}